Khi nghĩ về ô tô tự lái, chúng ta thường tưởng tượng những chiếc xe đưa chúng ta từ A đến B mà không cần sự can thiệp của con người, nhưng điều gì khiến một chiếc xe thực sự tự lái?
SAE International (Hiệp hội Kỹ sư Ô tô) xác định các cấp độ tự chủ của phương tiện giao thông khác nhau, từ cấp 0 (phương tiện tiện ích sử dụng hàng ngày) đến cấp 5 (phương tiện không cần sự tương tác của con người). Hiện tại, chúng ta đang ở xa mức tự động hóa cấp độ năm vì có nhiều tình huống mà các phương tiện tự động không thể sao chép.
Điều đó nói lên rằng, nếu ngành công nghiệp và học viện có thể duy trì hoạt động tốt, chúng ta có thể đến đó sớm hơn chúng ta nghĩ. Bạn thậm chí có thể tưởng tượng một chiếc xe hơi không có vô lăng?
Các khái niệm cảm biến trong xe tự hành

Trước khi chúng ta giải quyết các khía cạnh chính này của xe tự hành, có một số khái niệm cơ bản mà chúng ta cần khám phá trước, như các cảm biến mà chúng ta sử dụng.
LiDAR (phát hiện và phạm vi ánh sáng):
- 1 phương pháp viễn thám sử dụng ánh sáng ở dạng tia laser xung để đo các phạm vi (khoảng cách có thể thay đổi) tới trái đất.
- Công nghệ này quét các con đường và tòa nhà. Với quá trình quét LiDAR, chúng tôi tạo ra một điểm đám mây để đại diện cho thế giới thực.
RADAR (phát hiện và phạm vi vô tuyến)
- 1 hệ thống phát hiện sử dụng sóng vô tuyến để xác định phạm vi, góc hoặc vận tốc của các đối tượng.
- RADAR là một trong những cảm biến đơn giản nhất mà chúng ta có thể có trên xe tự hành. Chúng chỉ đạt khoảng cách ngắn nhưng tương đối rẻ khi so sánh với LiDAR.
- Hiện tại, nhiều phương tiện đã sử dụng công nghệ RADAR để ngăn ngừa va chạm trong quá trình đỗ xe.
GPS (hệ thống định vị toàn cầu)
- Khi sử dụng điện thoại thông minh, bạn có thể cần phải xác định vị trí địa lý của mình trên hành tinh.
- Bạn kích hoạt GPS của mình và đột nhiên bạn có Google Maps hoặc bất kỳ chức năng nào khác phụ thuộc vào vị trí địa lý.
Máy ảnh
- Đây là những cảm biến quan trọng trong xe tự hành cho phép xe ô tô xác định các đối tượng và con người trong thế giới thực.
- Nhờ sự phát triển mới nhất trong kỹ thuật học máy, đặc biệt là trong mạng nơ-ron phức hợp, các phương tiện tự hành có thể sử dụng camera để phát hiện đối tượng và xác định đối tượng.
3 yếu tố để một chiếc xe ô tô tự lái
Hãy cùng xem xét một số công nghệ hỗ trợ giúp xe tự lái và cách những công nghệ này tích hợp để cho phép ô tô, xe tải hoặc SUV tự động di chuyển trên đường phố.
Đầu tiên, hãy tưởng tượng chúng ta có một chiếc ô tô mà chúng ta muốn tự lái. Có ba yếu tố chính mà chiếc xe này sẽ cần:
- HDMap (Bản đồ độ nét cao)
- Công cụ ước tính vị trí địa lý
- Công cụ lập kế hoạch chuyển động
HDMap (Bản đồ độ nét cao)

Điều đầu tiên chiếc xe cần là khả năng phát hiện vị trí của nó trên thế giới. Để làm được điều này, xe tự động cần có HDMap bao gồm nhiều dữ liệu về đường và môi trường xung quanh. Xây dựng một HDMap đòi hỏi rất nhiều nỗ lực; có những công ty có mục đích duy nhất là tạo và cập nhật HDMaps.
Để tạo HDMap, sự kết hợp của LiDAR và camera sẽ quét khu vực xung quanh xe và dữ liệu này được phân tích bằng cách sử dụng thị giác máy tính để trích xuất tín hiệu đường, các phương tiện lân cận và các đối tượng làn đường.
Xe ô tô tự lái phải luôn biết mình đang ở làn nào trong suốt tuyến đường đã thiết lập, bao gồm tất cả các chuyển làn cần thiết. Để làm được điều này, chúng ta có thể sử dụng LANENET, một thư viện được sử dụng rộng rãi trong thế giới xe tự hành.
Công cụ ước tính vị trí địa lý
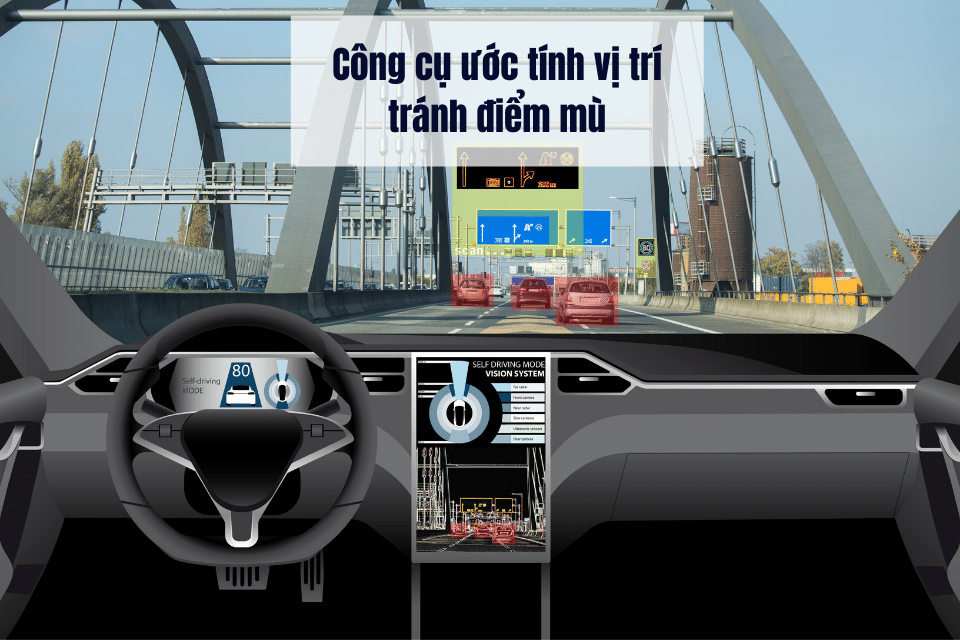
Các công cụ ước tính vị trí điều phối đầu vào từ tất cả các cảm biến trong xe tự hành và cập nhật vị trí địa lý của xe trong Bản đồ HDM. Công cụ ước tính trạng thái thực hiện điều này bằng cách nhận dữ liệu đầu vào và tổng hợp từ tất cả các bộ phận khác nhau của xe.
Các tình huống khác nhau có thể ưu tiên các cảm biến khác nhau. Ví dụ: nếu xe đang ở trong đường hầm, tín hiệu GPS có thể không đáng tin cậy và công cụ ước tính trạng thái có thể phải dựa vào các cảm biến khác như LiDAR, RADAR và chuyển động của lốp xe để cập nhật vị trí địa lý của xe.
Đồng thời, trên đường cao tốc (hoặc đường cao tốc của Vương quốc Anh), một chiếc xe tải có thể ở phía trước xe chặn cảm biến LiDAR nhận biết toàn bộ thế giới phía trước xe. Trong tình huống này, xe tự lái của chúng ta sẽ bị mù. Nhưng với tín hiệu HDMap và GPS đáng tin cậy, phương tiện của chúng ta có thể biết rất rõ điều gì ở phía trước (cho dù đó là đường giao nhau hay lối ra tiếp theo).
Cuối cùng, một công cụ ước tính trạng thái sẽ nhận và kết hợp dữ liệu từ nhiều cảm biến trong xe tự hành. Không phải tất cả các cảm biến đều gửi dữ liệu với tốc độ như nhau. Hệ thống LiDAR có thể cung cấp nhiều xung mỗi mili giây, trong khi GPS cần nhiều thời gian để cập nhật hơn. Bộ ước lượng trạng thái thống nhất các giá trị từ các đầu vào khác nhau.
Công cụ lập kế hoạch chuyển động

Công cụ lập kế hoạch chuyển động là một tập dữ liệu thuật toán lớn hoạt động dựa trên tuyến đường của xe. Người lập kế hoạch chuyển động phụ trách chuyển động. Nếu chúng ta có ý định di chuyển ô tô tự lái từ điểm A đến điểm B, lựa chọn đầu tiên có thể là đi tiếp (hoặc lùi hoặc rẽ).
Người lập kế hoạch chuyển động chịu trách nhiệm xác định những thao tác nào cần thiết để chiếc xe đến đích. Công cụ ước tính trạng thái giúp xe biết khi nào có chướng ngại vật cản trở tuyến đường của xe và công cụ lập kế hoạch chuyển động yêu cầu dừng khẩn cấp. Khi đến lúc xe chuyển làn, công cụ lập kế hoạch chuyển động gọi một thao tác để chuyển làn.
* * *
Đây là những khía cạnh cơ bản cần xem xét khi đi sâu vào thế giới của các phương tiện tự hành. Có nhiều thư viện, thuật toán và kiến trúc phương tiện khác cần xem xét trong quá trình phát triển xe tự hành, nhưng bây giờ bạn nên có hiểu biết cơ bản về điều gì khiến xe tự lái tự lái.
Nguồn dịch: Builtin